Introduction to Robotics-Stanford 笔记 LEC4
LEC4 Manipulator Kinematics 机械臂运动学
正运动学是一种随动坐标系与基坐标系之间的关系
Link Description 连杆描述
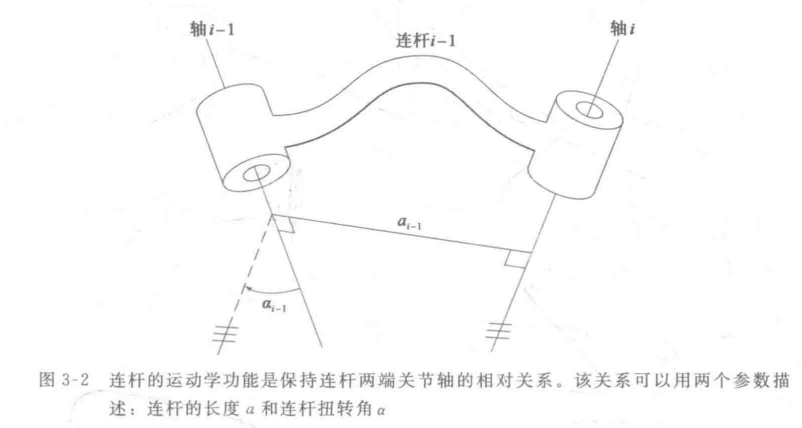
对于一个连杆,其两端有两个关节轴,如何描述这两个轴的关系?为了去确定机械臂两个相邻关节轴的位置关系,可把连杆看作一个刚体。用空间中的直线来表示关节轴。显然,在描述连杆的运动时,一个连杆运动可用两个参数描述,这两个参数定义了空间中两个关节轴之间的相对位置(距离和夹角)
:Link Length 连杆长度 - mutual perpendicular 两轴之间公垂线的长度
- unique except for parallel axis 是唯一的(平行轴例外)
是常数
:Link Twist 连杆扭转角 - measured in the right-hand sense about
假设一与公垂线 垂直的平面,将轴 和轴 投影到平面上,用右手定则从轴 绕 到轴 测量两轴线之间的夹角 是常数
- measured in the right-hand sense about
一种特殊情况是Intersecting Joint Axes(两个关节轴相交),在这种情况下,考虑轴
Link Connection 连杆连接的描述
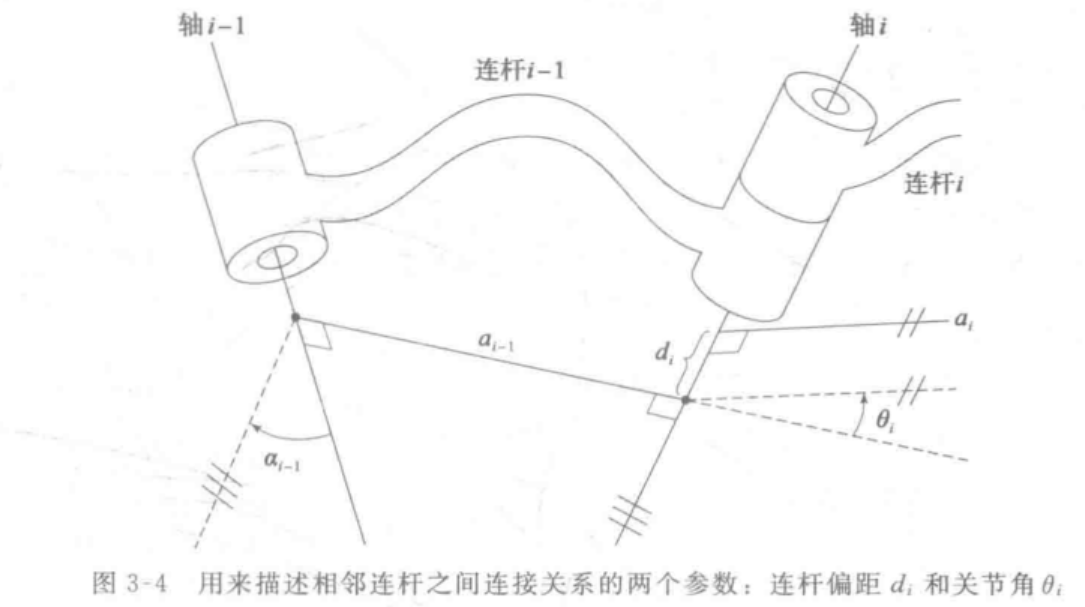
描述连杆连接时,同样只需要两个参数,这两个参数完全确定了所有连杆是怎么连接的。
处于运动链中间位置的连杆
:Link Offset 连杆偏距 - variable if joint
is prismatic 对于转动关节来说是固定不变的,但对于平移关节,就会沿着移动方向影响后续连杆的运动。如果是平移关节,那么 是变量。
- variable if joint
:Joint Angle 关节角 - variable if joint
is revolute - 对于一个转动关节,
是变量
- variable if joint
运动链中首端和末端连杆
首先是连杆长度和连杆扭转角。连杆长度
其次是连杆偏距和关节角。注意,
以上方法也适用于关节n。
连杆参数 Denavit-Hartenberg Parameters
由上可知,机器人的每个连杆都可以用4个运动学参数来描述,其中两个参数用于描述连杆本身(
例如,对于一个6关节机器人,需要用18个参数就可以完全描述这些固定的运动学参数。如果是6个转动关节的机器人,这时18个固定参数可以分为6组
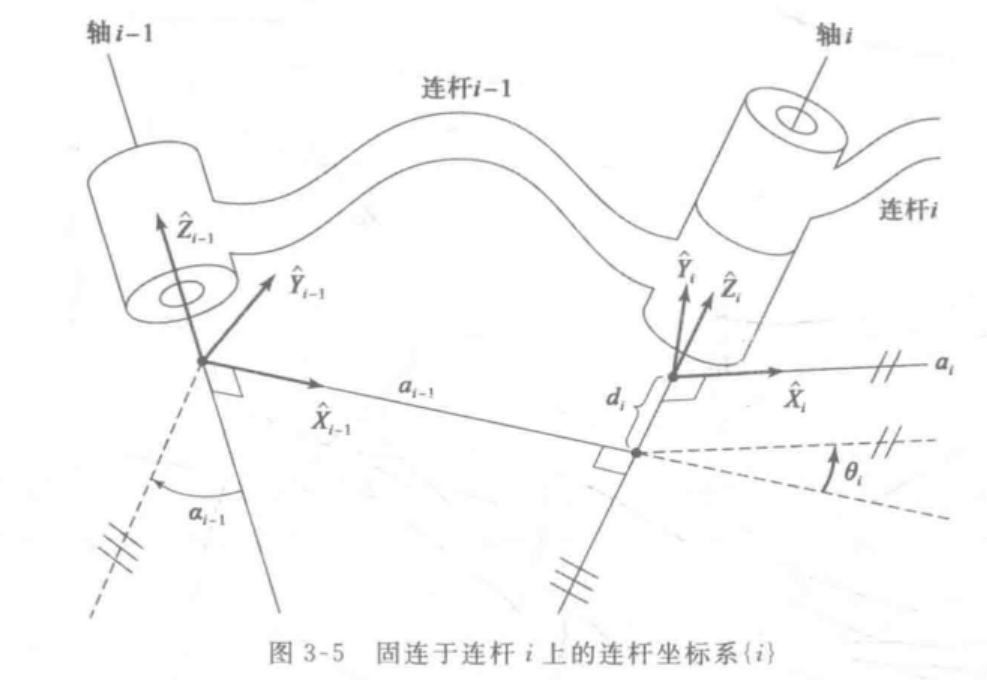
连杆坐标系的定义
为了描述每个连杆与相邻连杆之间的相对位置关系,需要在每个连杆上定义一个固连坐标系。根据固连坐标系所在连杆的编号对固连坐标系命名,因此,固连在连杆
运动链中间位置连杆坐标系的定义
通常按照如下方法确定连杆上的固连坐标系:坐标系
当
运动链中首端连杆和末端连杆坐标系的定义
固连于基座(即连杆0)上的坐标系为坐标系
参考坐标系
- 首端连杆
- 当关节1为转动关节时,
,当 时, - 当关节1为移动关节时,
,当 时,
- 当关节1为转动关节时,
- 末端连杆
- 当关节n为转动关节时,
,当 时, - 当关节n为移动关节时,
,当 时,
- 当关节n为转动关节时,
总结一下四个参数:
: distance along : angle about : distance along : angle about
例子:
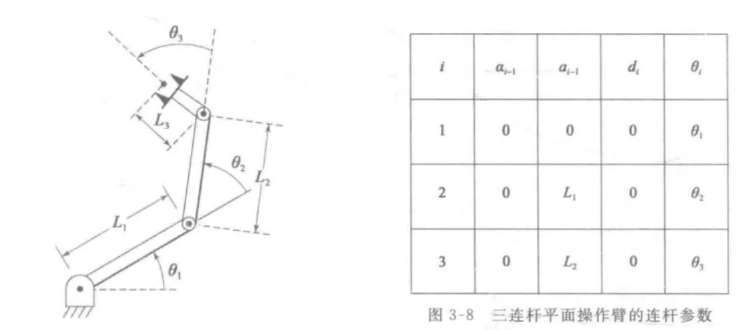
机械臂运动学 Forward Kinematics
连杆变换的推导
描述连杆的四个参数分别对应一个简单的坐标系变换,一共四个坐标系变换。
我们希望建立坐标系
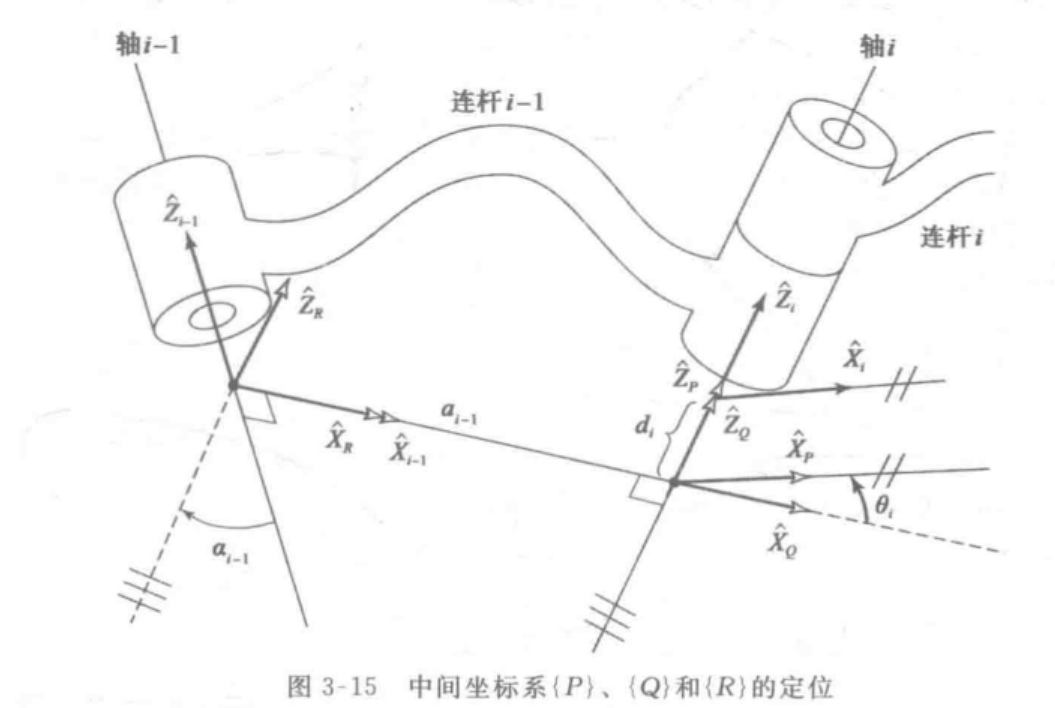
由于旋转
整个过程可以写成
考虑每一个变换矩阵,上式可以写成
计算可得
结合上面例子中给出的参数表,就可以写出整个变换矩阵
连杆变换的连乘
如果已经定义了连杆坐标系和相应的连杆参数,就能直接建立运动学方程。由连杆参数值,我们可以计算出各个连杆变换矩阵。把这些连杆变换矩阵连乘就能得到一个坐标系
变换矩阵