Introduction to Robotics-Stanford 笔记 LEC2
这自动识别的字幕和机翻看得是真的费劲啊。。。
Spatial Descriptions 空间描述
- Task Description: 确定机器人的位置、框架、连杆和关节
- Transformations: 知道一个连杆/构件(这里把一个机械臂描述成连杆和关节组成的链条)的位置时,将该描述转换成下一个link的描述或者前一个link的末端位置和方向
- Representations: 如何表示位置和方向
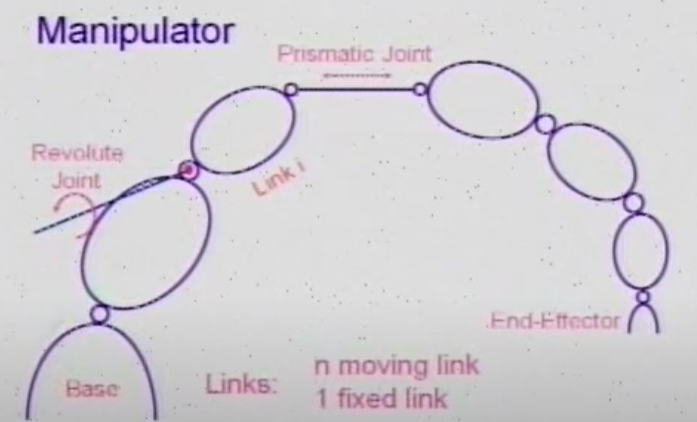
任何一组关节都可以简化为两种类型的关节:旋转关节(Revolute joints)和棱柱关节(Prismatic joints)。旋转关节允许围绕固定轴旋转,棱柱关节允许沿着固定轴平移假设有
n个移动link和1个固定link
Configure Parameters
- 定义:A set of position parameters that describes the full configuration of the system.
- 问题描述:我们如何表示manipulator的配置,因为我们需要知道manipulator在空间中相对于固定框架的位置
- 一种方法是在link的三个不同点使用三个向量(?),由此定义一个link。在这种情况下,每个向量在三维空间中有三个参数,因此描述一个link需要9个参数,则一共需要9n个参数,参数量很大。实际上不需要三个点三个向量中的所有参数,因为这三个向量实际上不是相互独立的
- 需要找出一组具有最小数量的特定参数集配置参数:Generalized coordinates
- Generalized coordinates: A set of independent configuration parameters
- 本质上是一组配置参数,带来完全独立的参数,通过它们可以发现动力学,可以直接提供机器人的自由度数
Generalized Coordinates
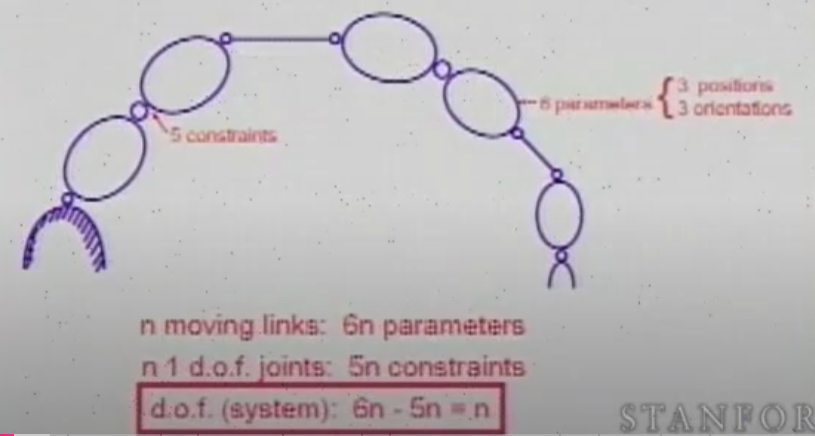
- 自由度讨论:假设断开关节只考虑每个link,视作一个自由刚体,一个刚体有6个自由度,一共6n个自由度;单独考虑关节,由于旋转关节和棱柱关节都只有一个自由度,引入了5个约束,因此总共有5n个约束。因此总自由度是6n-5n=n
End-Effector Configuration Parameters 末端执行器配置参数
- A set of m parameters:
that completely specifies the end-effector position and orientation with respect to {0} (fixed frame) 注意这里的m个参数并不一定是独立的 - 例如旋转矩阵(方向余弦矩阵)等
- 例如旋转矩阵,其中共有9个参数,如果再加上三个表示平移的参数,一共12个参数就能表示末端执行器的位置和方向。
Operational Coordinates
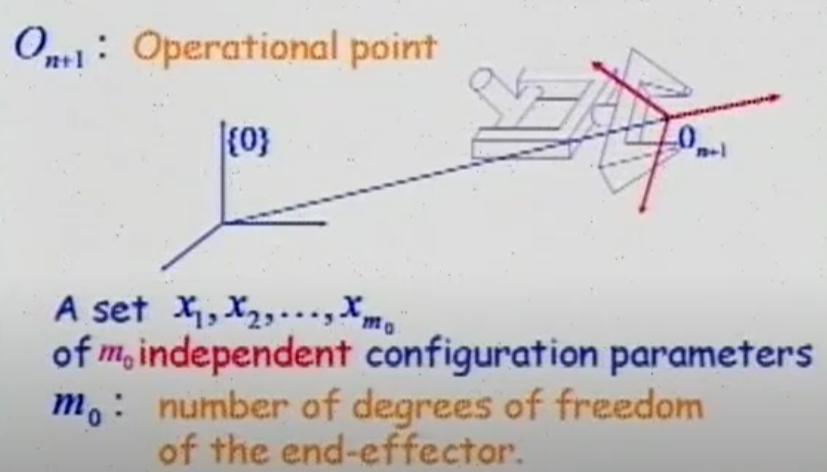
- Operational Point:机器人在我们定义任务的地方起作用的点
- 例如夹取任务,Operatinal Coordinates可能是两个夹爪之间的某个点
- Operational Coordinates: A set of m0 independent configuration parameters.
- m0: number of degrees of freedom of the end-effector,m0是等于末端执行器自由度数
- 注意这里的m0个参数是独立的
Joint Coordinates
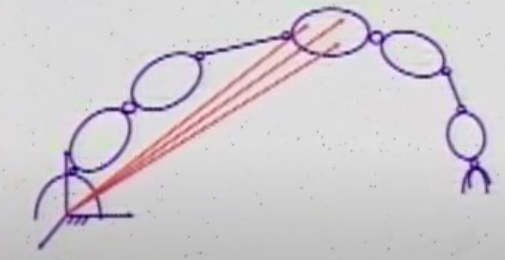
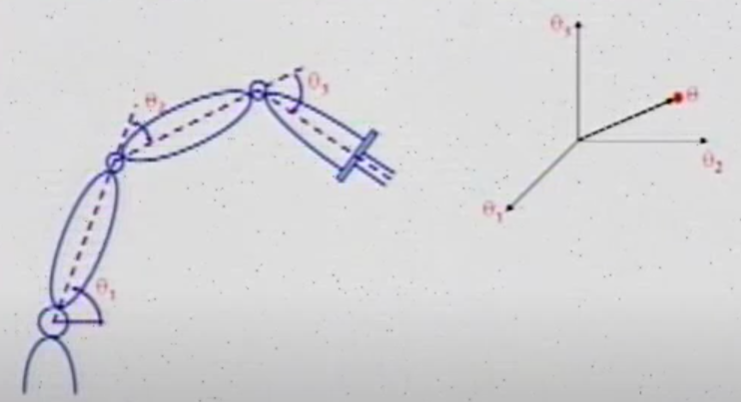 如图中的一个平面机器人,拥有三个旋转关节
如图中的一个平面机器人,拥有三个旋转关节
关节空间在运动规划中起着非常重要的作用
Operational Coordinates
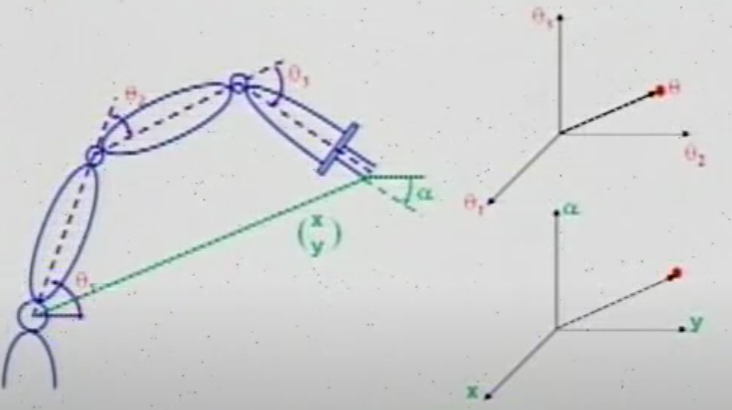 对于末端执行器来说,可以用向量
对于末端执行器来说,可以用向量
由此,一个机器人被简化成了关节空间里的一个点
,末端执行器被简化成了操作空间的一个点 。这两个空间完全描述了机器人的配置。
新的问题:如果给机器人添加一个关节,那么配置可能会有所不同,即存在冗余
Redundancy 冗余
A robot is said to be redundant if :
如果机器人的自由度n大于末端执行器的自由度,则称其为冗余机器人。
冗余有很多作用,例如可以帮助机器人在各种配置下绕过障碍物。
- Degrees of redundancy冗余度:
Position of a Point
如何定义空间中的一个点?描述一个点的位置一定是相对于某一个点来讲的。
With respect to a fixed origin O, the position of a point P is described by the vector OP or simply by p.
Coordinate Frames 坐标系
 旋转与平移的变换对刚体描述的影响,这里都是些坐标系变换的知识
旋转与平移的变换对刚体描述的影响,这里都是些坐标系变换的知识
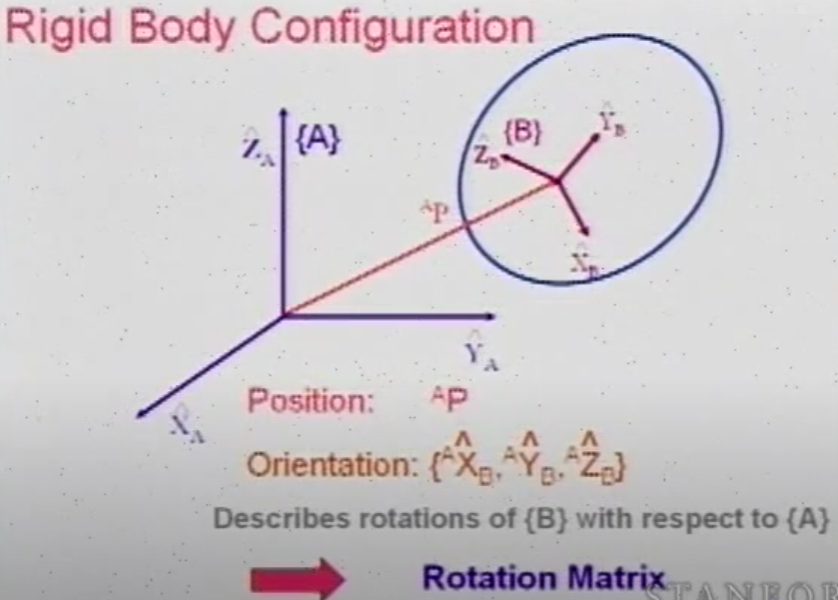
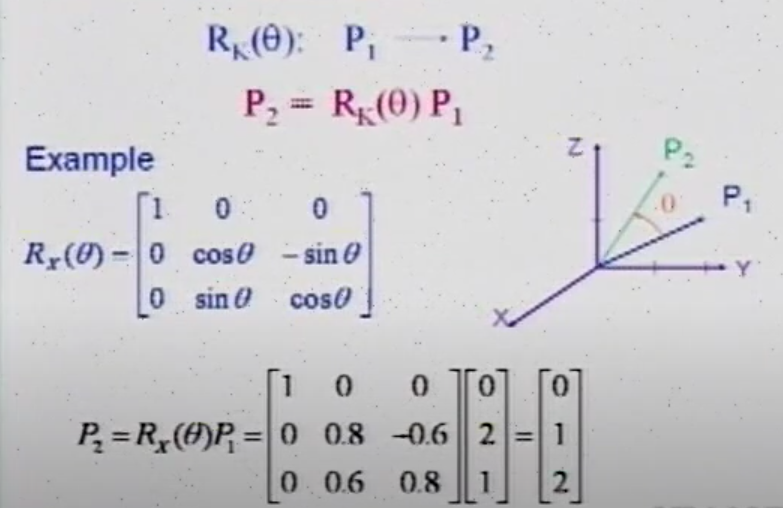
Rotation Matrix 旋转矩阵
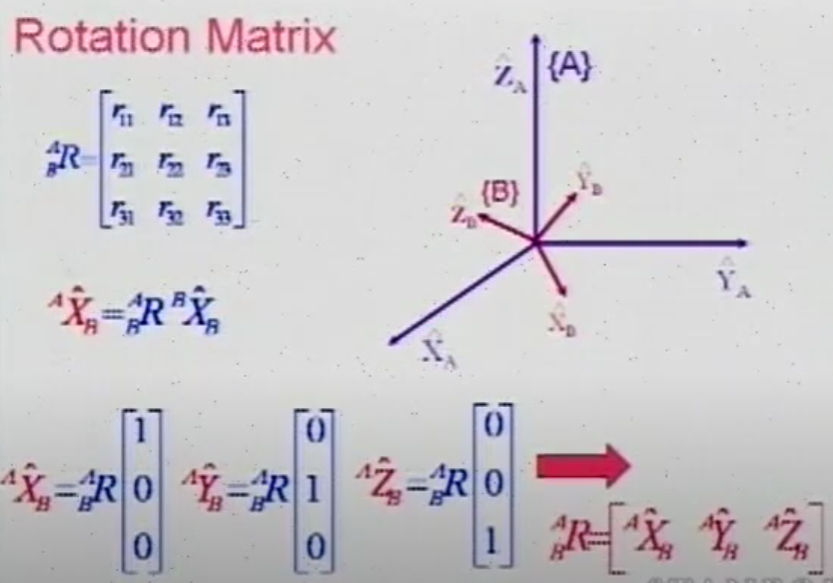
坐标系A到坐标系B的旋转矩阵就是
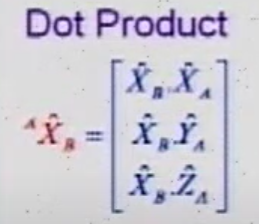
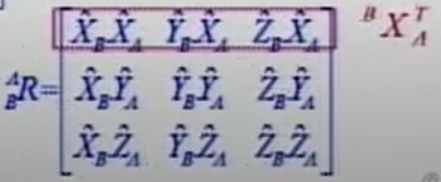
在坐标系A中的分量,即旋转矩阵的列是新坐标系的XYZ轴在原坐标系下的分量,通过点乘就可以得到:
此外可以发现,旋转矩阵的行,是
在坐标系B中的分量的转置,即旋转矩阵的行是原坐标系的XYZ轴在新坐标系下的分量
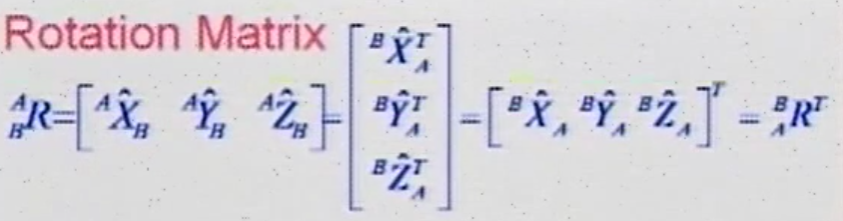
一个结论:A到B的旋转矩阵和B到A的旋转矩阵是转置关系,同时A到B的旋转矩阵和B到A的旋转矩阵是互逆的,所以有以下关系:
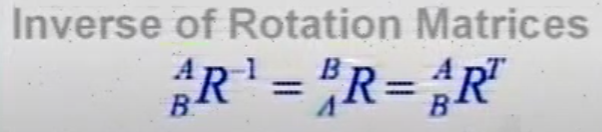 数学上的理解:由于坐标轴总是规范正交的,因此旋转矩阵的行向量/列向量之间也是规范正交的,正交矩阵的转置等于它的逆矩阵。 ### Example:
数学上的理解:由于坐标轴总是规范正交的,因此旋转矩阵的行向量/列向量之间也是规范正交的,正交矩阵的转置等于它的逆矩阵。 ### Example: 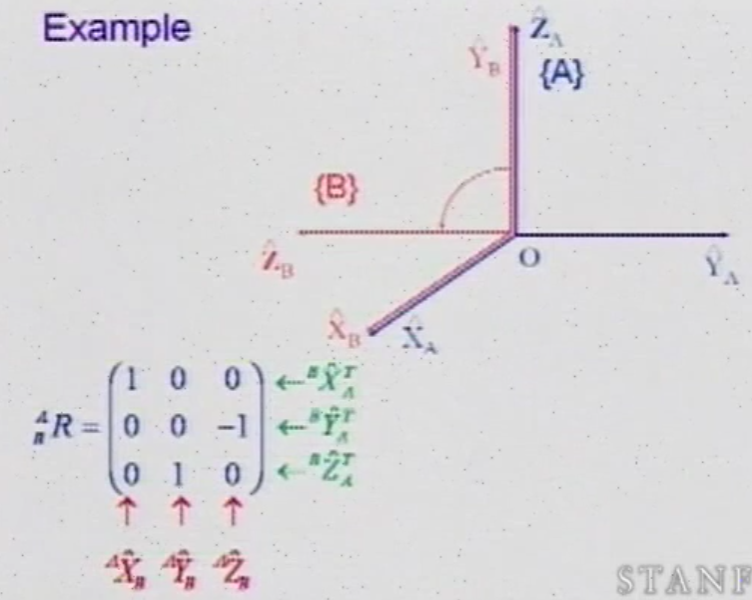
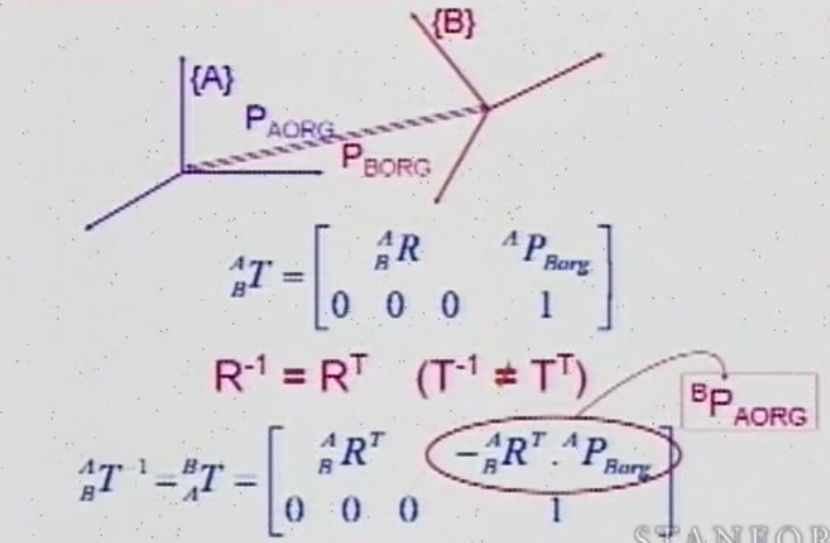
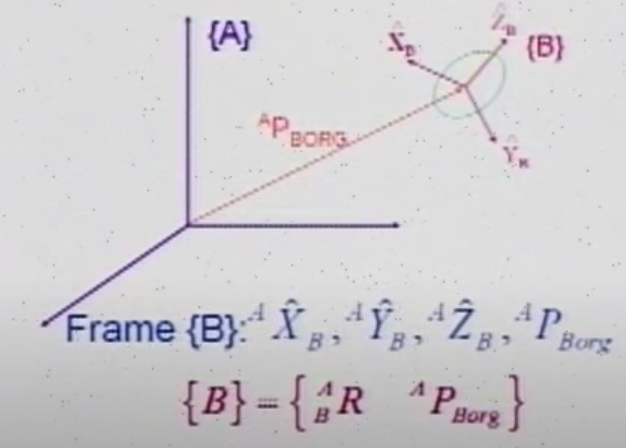
Description of a Frame with respect to reference fame
通过旋转矩阵和B相对于A原点位置向量:
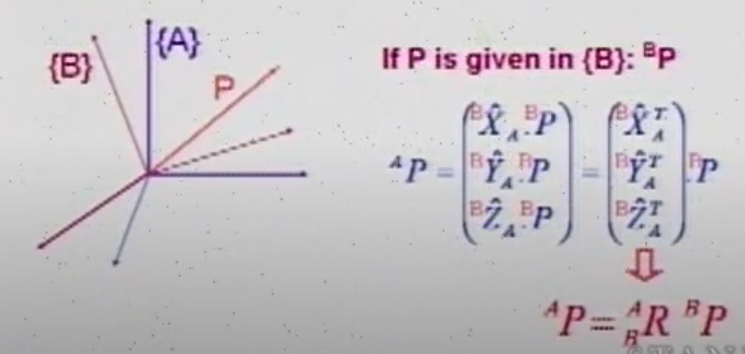
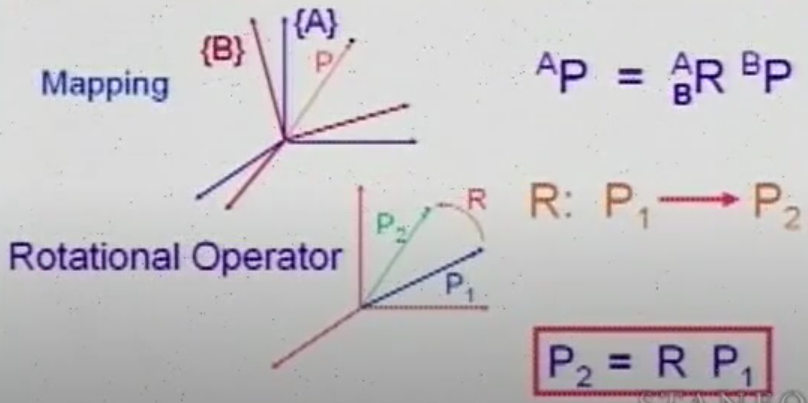
Mapping
changing vector descriptions from frame to frame
Rotations
Translations
changing the position description of a point P
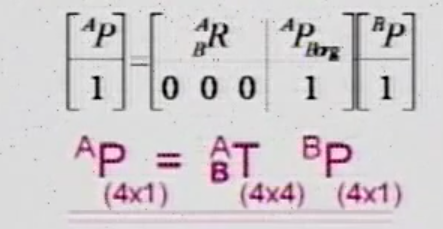
General Transform
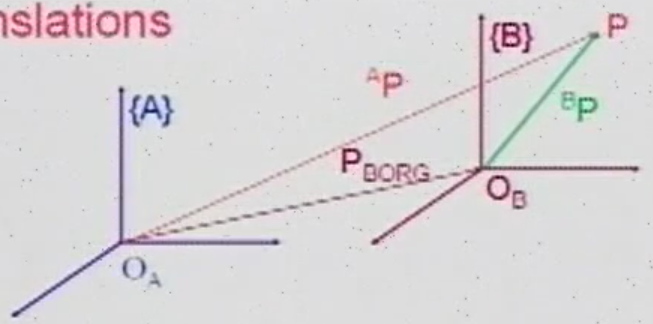
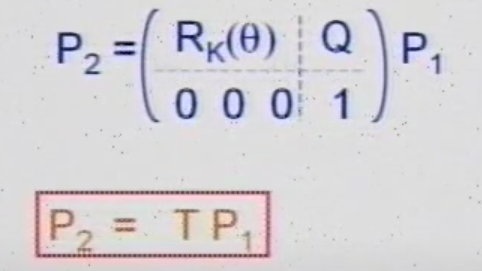
在连杆之间应用一般变换,我们应该能够计算并传播构件,但这个描述并不容易实现,因为当有很多个构件时,矩阵乘法和矩阵加法混在一起
处理这种转换的更好方法是尝试将其以齐次形式呈现 这是在三维空间的两个向量的和,不能以齐次形式表示,但如果进入四维空间,就可以将其以齐次形式表示,只需要多加一行:
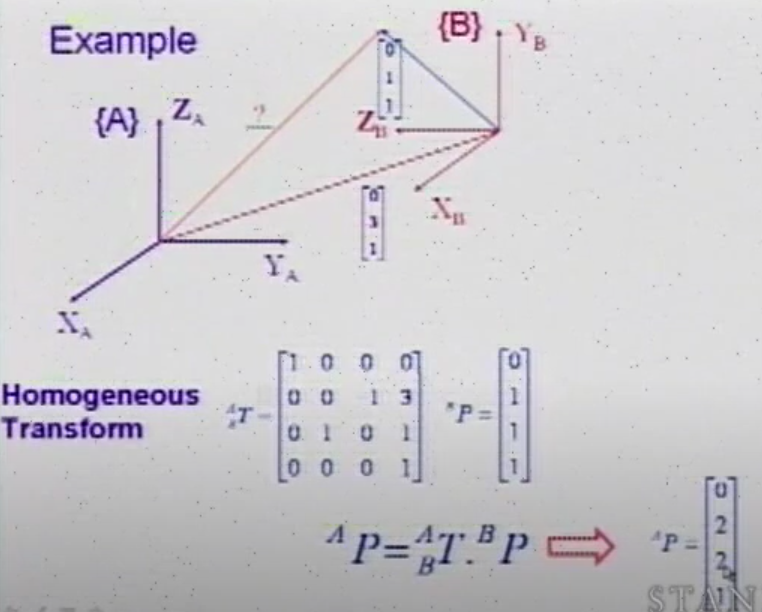
Example:
Operators
- Mapping: changing descriptions from frame to frame
- Operators: moving points (within the same frame)
映射并没有改变点,只是将点在一个坐标系下的表述转换成了另一个坐标系下的描述; 操作改变了点,并且仍然在原坐标系下描述。
Rotational Operators
Translations
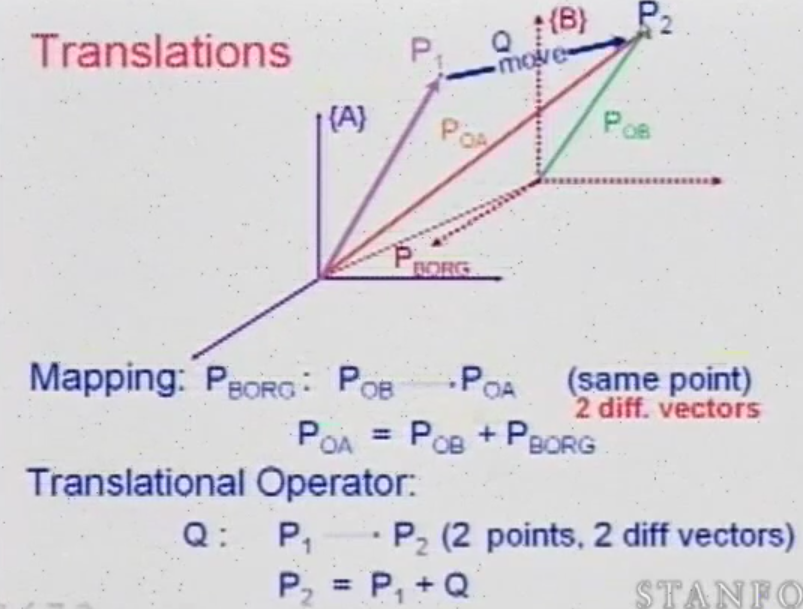
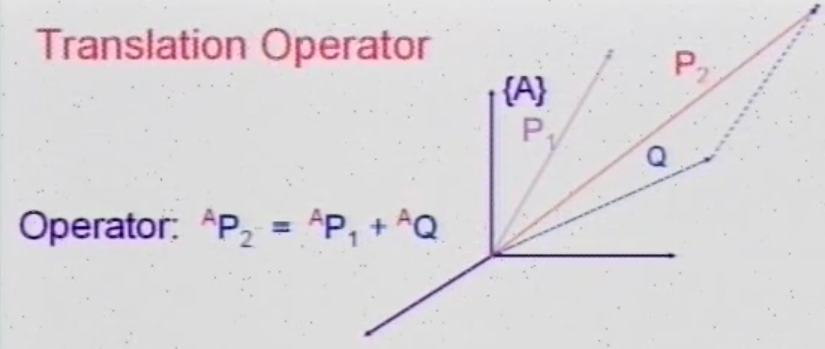
注意,应用平移操作时,必须确保Q和P1在同一坐标系下进行描述,并且结果也是在同一坐标系下的描述
General Operators
必须确保对所有操作使用相同的坐标系
Inverse Transform
由于引入平移向量变成齐次形式,广义变换矩阵并不一定是正交的,也就不能像旋转矩阵一样直接求转置当成逆矩阵。 可以考虑分块矩阵: