Introduction to Robotics-Stanford 笔记 LEC1
最近开始学习机器人学,目前跟着斯坦福大学的机器人学导论公开课学,记录一下第一课的笔记,都是些简单介绍的概念。 斯坦福大学机器人学导论公开课地址: Lecture 1 | Introduction to Robotics
Lecture 1 | Introduction to Robotics
要控制机器人,首先需要找到机构本身的所有位置和方向,这需要我们找到物体在空间中的位置和方向的描述。然后我们需要处理附加到这些不同物体的框架之间的变换
Spasial Descriptions 空间描述
- Position and Orien tation 位置和方向
- Transformations between Frames 两个框架之间的变换
- Forward Kinematics 正向运动学:给出关节角度与末端执行器位置之间的关系,即将关节空间映射到笛卡尔空间
- 例如D-H参数法
Manipulator Kinematics 机械臂运动学
- Link Description 连杆描述
- Denavit-Hartenberg Notion D-H参数法
- Forward Kinematics 正向运动学
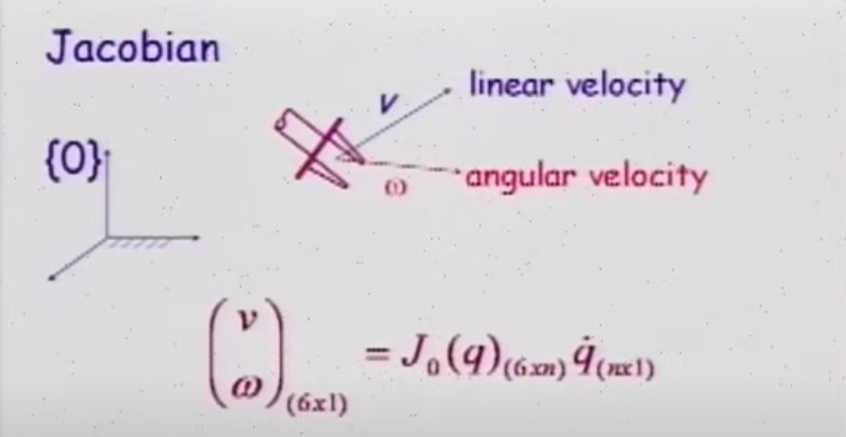
Jacobian(雅可比矩阵):Velocities and Forces 力和速度
- Velocities: end-effector linear and angular velocities 末端执行器的线速度和角速度
- Forces: end-effoctor foeces and movements 末端执行器的力和运动
- Jacobian: relations
- joint velocities and end-effector velocities 关节速度和末端执行器速度之间的关系
- joint torques and end-effector forces 关节力矩和末端执行器力之间的关系
Inverse Kinematics 逆运动学
Finding joint positions given end-effector positions and orientations 给定末端执行器的位置和方向,求关节位置 - Solvability, Existence, Multiplicity 可解性,存在性,多重性 - Closed Form/Numerical Solutions 闭式解(解析解)/数值解
Trajectory Generation 轨迹生成
通过以上解决方案,我们可以在机器人的给定点的位置之间进行插值,然后通过速度和加速度均平滑的轨迹以及我们可能施加的其他约束将机器移动到最终的配置(在关节空间和笛卡尔空间中) - Path Description 路径描述 - Joint Space Trajectory 关节空间轨迹 - Cartesian Space Trajectory 笛卡尔空间轨迹
Manipulator Control 机械臂控制
用动态结构增强控制器将PID等控制方式运用到关节空间和任务空间中,以便我们在控制机器人时考虑动力学:with the dynamic structure structure so that we account for dynamics when we are controlling the robot. - PID Control - Joint Space Dynamic Control 关节空间动态控制 - Catesian Space Dynamic Control 笛卡尔空间动态控制
Manipulator Force Control 机械臂力控制
在移动中产生接触(contact)时,作用力会将整个结构置于一个约束下,必须考虑这些约束并计算法线以找到反作用力,以便控制施加到环境的力。所以我们需要处理力控制,需要稳定地从自由空间(free space)到接触空间(contact space)的过渡,即需要能够移动时控制这些接触力 - Constrained Motion 受约束的运动 - Position/Force Control 位置/力控制 - Contact Stability 接触稳定性
Unified Motion/Force Control 统一运动/力控制
在笛卡尔空间或者任务空间中,可以将两种力(motion force 和 contact force)合并在一起,直接控制机器人产生运动和接触